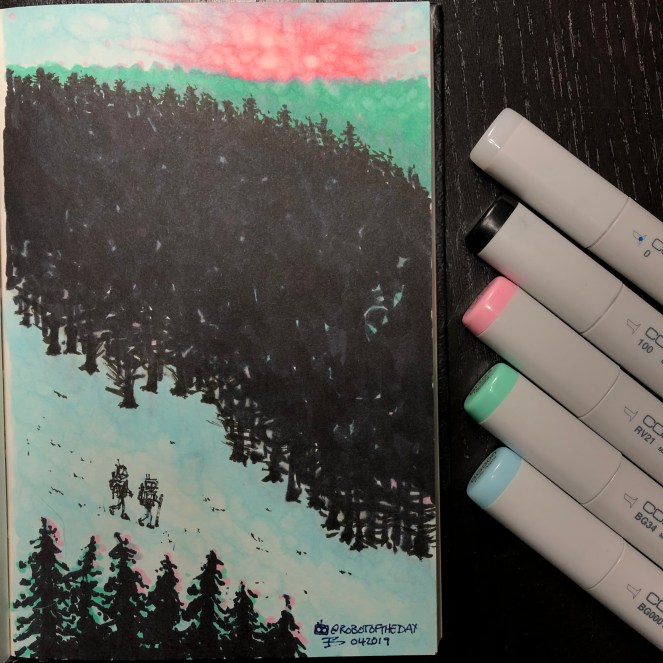
Their journey took the robots through ever stranger landscapes. One evening, at sunset, the sky appeared to be consumed in a silent explosion. They were momentarily alarmed, however neither of them detected any rapid changes in local atmospheric conditions or an increase in EMF. Even so, there was a low-level background noise that defied analysis…