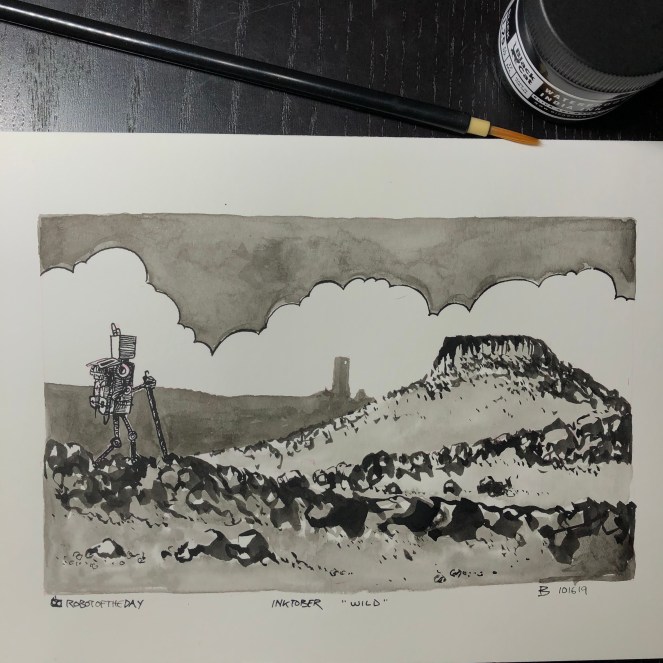
The next morning the robot set out at first light, seeking the source of the EM spike. After a while the terrain became rocky and wild, straining servos and gyros. Happening upon the desiccated remains of a tree, they fashioned a walking staff out of a branch and continued on, the tripod stance providing welcome additional stability.